
排序算法
算法概述
常见的排序算法
- 冒泡排序
- 选择排序
- 插入排序
- 归并排序
- 快速排序
- 堆排序
- 基数排序(非比较类算法)
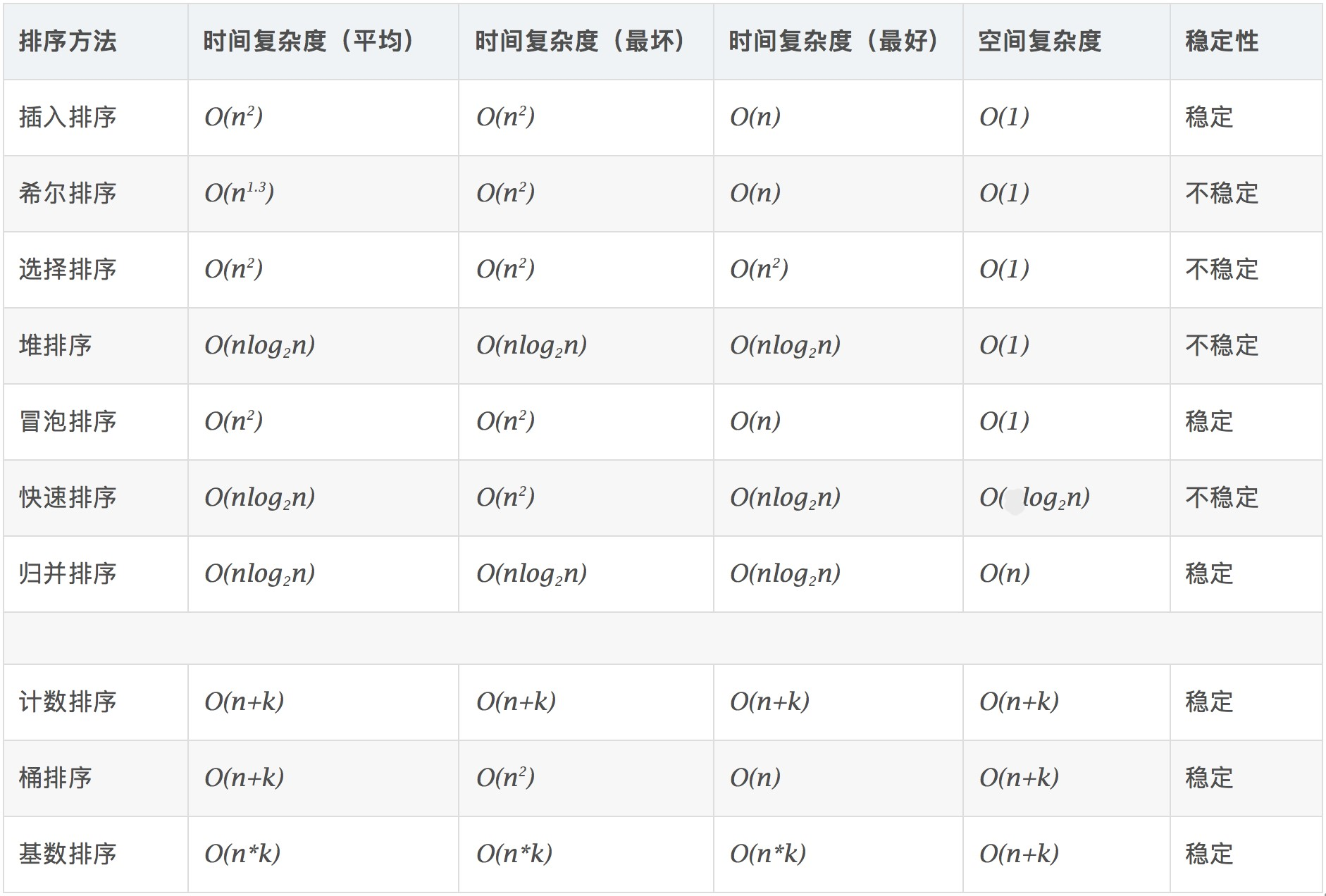
算法复杂度
相关概念
稳定:如果 a 原本在 b 前面,而 a=b,排序之后 a 仍然在 b 的前面。不稳定:如果 a 原本在 b 的前面,而 a=b,排序之后 a 可能会出现在 b 的后面。时间复杂度:对排序数据的总的操作次数。反映当 n 变化时,操作次数呈现什么规律。空间复杂度: 是指算法在计算机内执行时所需存储空间的度量,它也是数据规模 n 的函数
冒泡排序
算法描述
- 比较相邻的元素。如果第一个比第二个大,就交换它们两个;
- 对每一对相邻元素作同样的工作,从开始第一对到结尾的最后一对,这样在最后的元素应该会是最大的数;
- 针对所有的元素重复以上的步骤,除了最后一个;
- 重复步骤 1~3,直到排序完成。
动画演示
代码实现
1 | //冒泡排序算法 |
选择排序
算法描述
首先在未排序序列中找到最小(大)元素,存放到排序序列的起始位置,然后,再从剩余未排序元素中继续寻找最小(大)元素,然后放到已排序序列的末尾。以此类推,直到所有元素均排序完毕。
动画演示
代码实现
1 | void SelectSort(ElemType A[],int n)( |
算法分析
是一种不稳定算法 例如举个例子,序列arr = [5 8 5 2 9],我们知道第一遍选择第1个元素5会和2交换,那么原序列中两个5的相对前后顺序就被破坏了,所以选择排序是一个不稳定的排序算法。却是表现最稳定的排序算法之一,因为无论什么数据进去都是 O(n2)的时间复杂度,所以用到它的时候,数据规模越小越好。唯一的好处可能就是不占用额外的内存空间了吧。理论上讲,选择排序可能也是平时排序一般人想到的最多的排序方法了吧。
插入排序
算法描述
插入排序(Insertion-Sort)的算法描述是一种简单直观的排序算法。它的工作原理是通过构建有序序列,对于未排序数据,在已排序序列中从后向前扫描,找到相应位置并插入
- 从第一个元素开始,该元素可以认为已经被排序;
- 取出下一个元素,在已经排序的元素序列中从后向前扫描;
- 如果该元素(已排序)大于新元素,将该元素移到下一位置;
- 重复步骤 3,直到找到已排序的元素小于或者等于新元素的位置;
- 将新元素插入到该位置后;
- 重复步骤 2~5。
动画演示
代码实现
1 | //插入排序方法 |
算法分析
是一种稳定的排序算法,插入排序在实现上,通常采用 in-place 排序(即只需用到 O(1)的额外空间的排序),因而在从后向前扫描过程中,需要反复把已排序元素逐步向后挪位,为最新元素提供插入空间。
归并排序
算法描述
归并排序是建立在归并操作上的一种有效的排序算法。该算法是采用分治法(Divide and Conquer)的一个非常典型的应用。将已有序的子序列合并,得到完全有序的序列;即先使每个子序列有序,再使子序列段间有序。若将两个有序表合并成一个有序表,称为 2-路归并.
- 把长度为 n 的输入序列分成两个长度为 n/2 的子序列;
- 对这两个子序列分别采用归并排序;
- 将两个排序好的子序列合并成一个最终的排序序列。
动画演示
代码实现
1 | int *B=(int *)malloc(n*sizeof(int));//辅助数组B |
算法分析
归并排序是一种稳定的排序方法。和选择排序一样,归并排序的性能不受输入数据的影响,但表现比选择排序好的多,因为始终都是 O(nlogn)的时间复杂度。代价是需要额外的内存空间。
快速排序
算法描述
快速排序的基本思想:通过一趟排序将待排记录分隔成独立的两部分,其中一部分记录的关键字均比另一部分的关键字小,则可分别对这两部分记录继续进行排序,以达到整个序列有序。
快速排序使用分治法来把一个串(list)分为两个子串(sub-lists)。具体算法描述如下:
- 从数列中挑出一个元素,称为 “基准”(pivot);
- 重新排序数列,所有元素比基准值小的摆放在基准前面,所有元素比基准值大的摆在基准的后面(相同的数可以到任一边)。在这个分区退出之后,该基准就处于数列的中间位置。这个称为分区(partition)操作;
- 递归地(recursive)把小于基准值元素的子数列和大于基准值元素的子数列排序。
动画演示
代码实现
1 | int partition(int A[],int low,int high){ //一趟划分 |
算法分析
快速排序是一种不稳定算法,快速排序算法的最坏情况是数据元素已全部有序,此时数据元素数组的根结点的分需次数构成一棵二叉退化树(即单分支二叉树),一棵二叉退化树的深度是 n.所以最坏情况下快速排序算法的时间复杂度为 O(n2)。般情况下.标准元素值的分布是随机的,这样的二支树的深度接近于 log2n,所以快速排序算法的平均(或称期望)时间复杂度为 O(nlog2n)
希尔排序
算法描述
1959年Shell发明,第一个突破O(n2)的排序算法,是简单插入排序的改进版。它与插入排序的不同之处在于,它会优先比较距离较远的元素。希尔排序又叫缩小增量排序
- 选择一个增量序列t1,t2,…,tk,其中ti>tj,tk=1;
- 按增量序列个数k,对序列进行k 趟排序;
- 每趟排序,根据对应的增量ti,将待排序列分割成若干长度为m 的子序列,分别对各子表进行直接插入排序。仅增量因子为1 时,整个序列作为一个表来处理,表长度即为整个序列的长度。
动画演示
算法分析
希尔排序时不稳定算法,希尔排序的核心在于间隔序列的设定。既可以提前设定好间隔序列,也可以动态的定义间隔序列。
堆排序
算法描述
堆排序(Heapsort)是指利用堆这种数据结构所设计的一种排序算法。堆积是一个近似完全二叉树的结构,并同时满足堆积的性质:即子结点的键值或索引总是小于(或者大于)它的父节点。
- 将初始待排序关键字序列(R1,R2….Rn)构建成大顶堆,此堆为初始的无序区;
- 将堆顶元素
R[1]与最后一个元素R[n]交换,此时得到新的无序区(R1,R2,……Rn-1)和新的有序区(Rn),且满足R[1,2…n-1]<=R[n]; - 由于交换后新的堆顶
R[1]可能违反堆的性质,因此需要对当前无序区(R1,R2,……Rn-1)调整为新堆,然后再次将R[1]与无序区最后一个元素交换,得到新的无序区(R1,R2….Rn-2)和新的有序区(Rn-1,Rn)。不断重复此过程直到有序区的元素个数为 n-1,则整个排序过程完成。
动画演示
算法分析
堆排序是一种不稳定排序算法,对于 n 个元素的序列,构造堆过程,需要遍历的元素次数为 O(n),每个元素的调整次数为 O(log2n),所以构造堆复杂度为 O(nlog2n)。迭代替换待排序集合首尾元素的次数为 O(n),每次替换后调整次数为 O(log2n),所以迭代操作的复杂度为 O(nlog2n)。由此可知堆排序的时间复杂度为 O(nlog2n),排序过程属于原地排序,不需要额外的存储空间,所以空间复杂度为 O(1)。
基数排序
算法描述
基数排序是按照低位先排序,然后收集;再按照高位排序,然后再收集;依次类推,直到最高位。有时候有些属性是有优先级顺序的,先按低优先级排序,再按高优先级排序。最后的次序就是高优先级高的在前,高优先级相同的低优先级高的在前。
- 取得数组中的最大数,并取得位数;
- arr 为原始数组,从最低位开始取每个位组成 radix 数组;
- 对 radix 进行计数排序(利用计数排序适用于小范围数的特点);
动画演示
算法分析
基数排序时一种稳定的排序算法,在每一位的排序过程中,基数排序使用稳定的排序算法(通常是桶排序或计数排序)来保持相同关键字的相对顺序。在分配和收集的过程中,相同关键字的元素会被依次放入相应的桶中,并在下一轮排序时按照桶的顺序被取出。这就确保了在同一位上相同元素的相对顺序保持不变。







